Japan (Tokyo)
Soft robot technology is often considered to be robots without ‘bones’, which can move and manipulate thanks to their rubbery ‘skeletons’. But forget the bones, award-winning mechanical engineer Koichi Suzumori from the Tokyo Institute of Technology is more interested in the muscles. As one of the leaders and pioneers in the development of thin McKibben pneumatic artificial muscles and their application in soft robotics, Suzumori aims to bring big benefits to such fields as nursing care, medicine, and search and rescue.
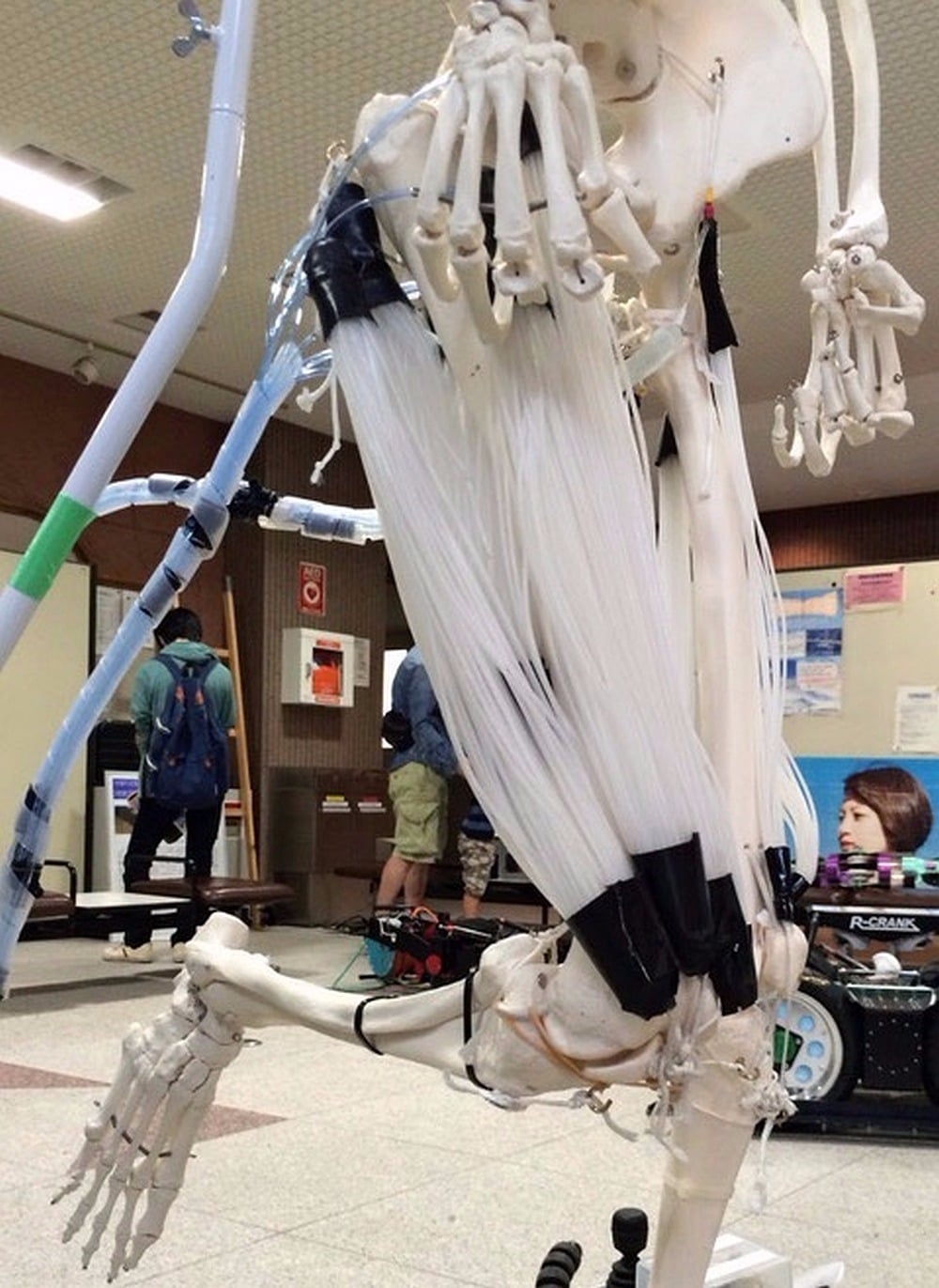
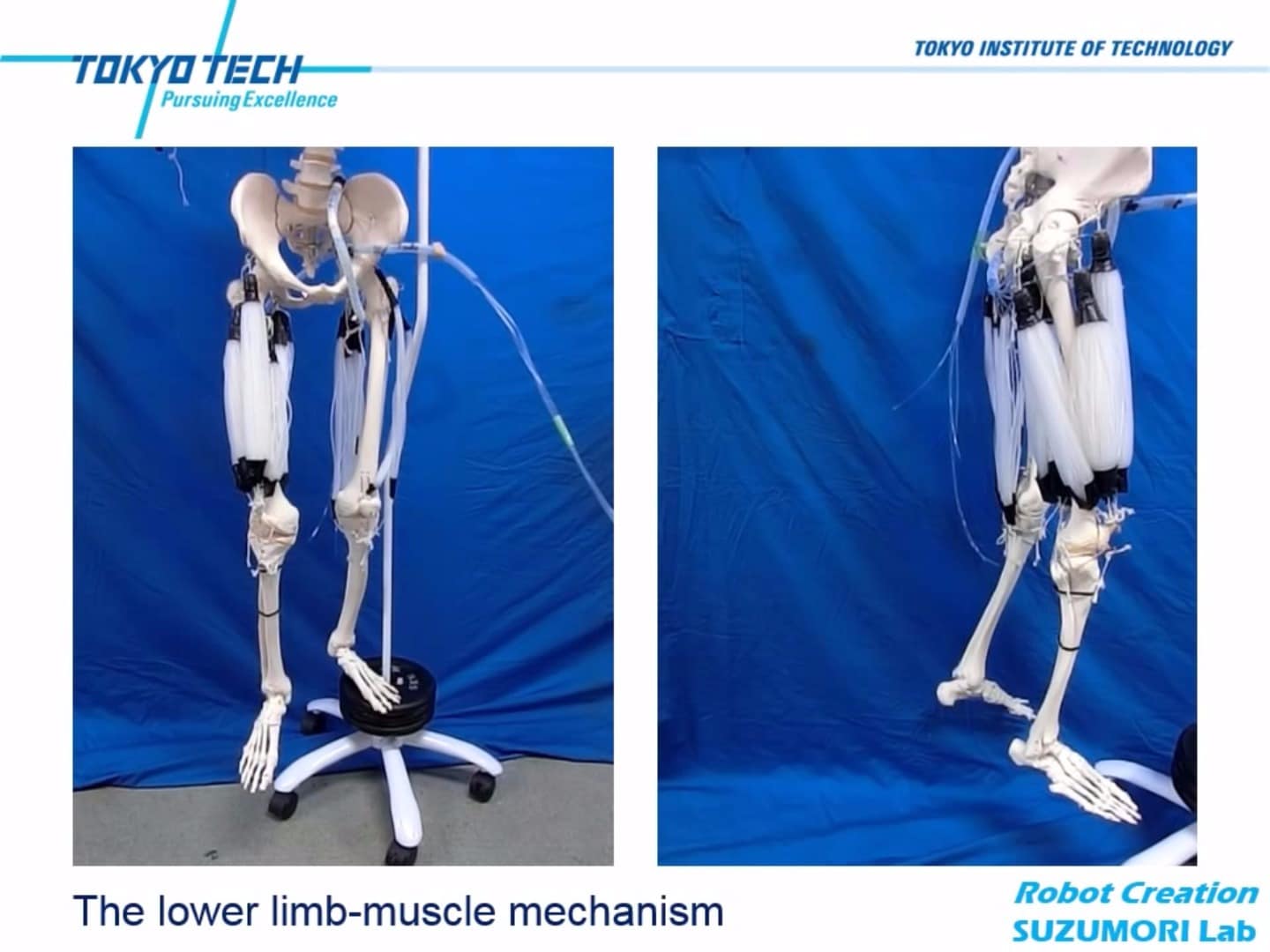
Suzumori’s Tokyo team has developed artificial muscle fibres which contract and expand in response to an electric, pneumatic or other stimulus – and move in ways similar to their biological counterparts. A bundle of rubber tubes are covered with a mesh made of a strong synthetic fibre. Approximately 400 tubes can be bandied together, with air sent through each tube to make them contract, reproducing the movements of hamstrings and muscles around the knee.
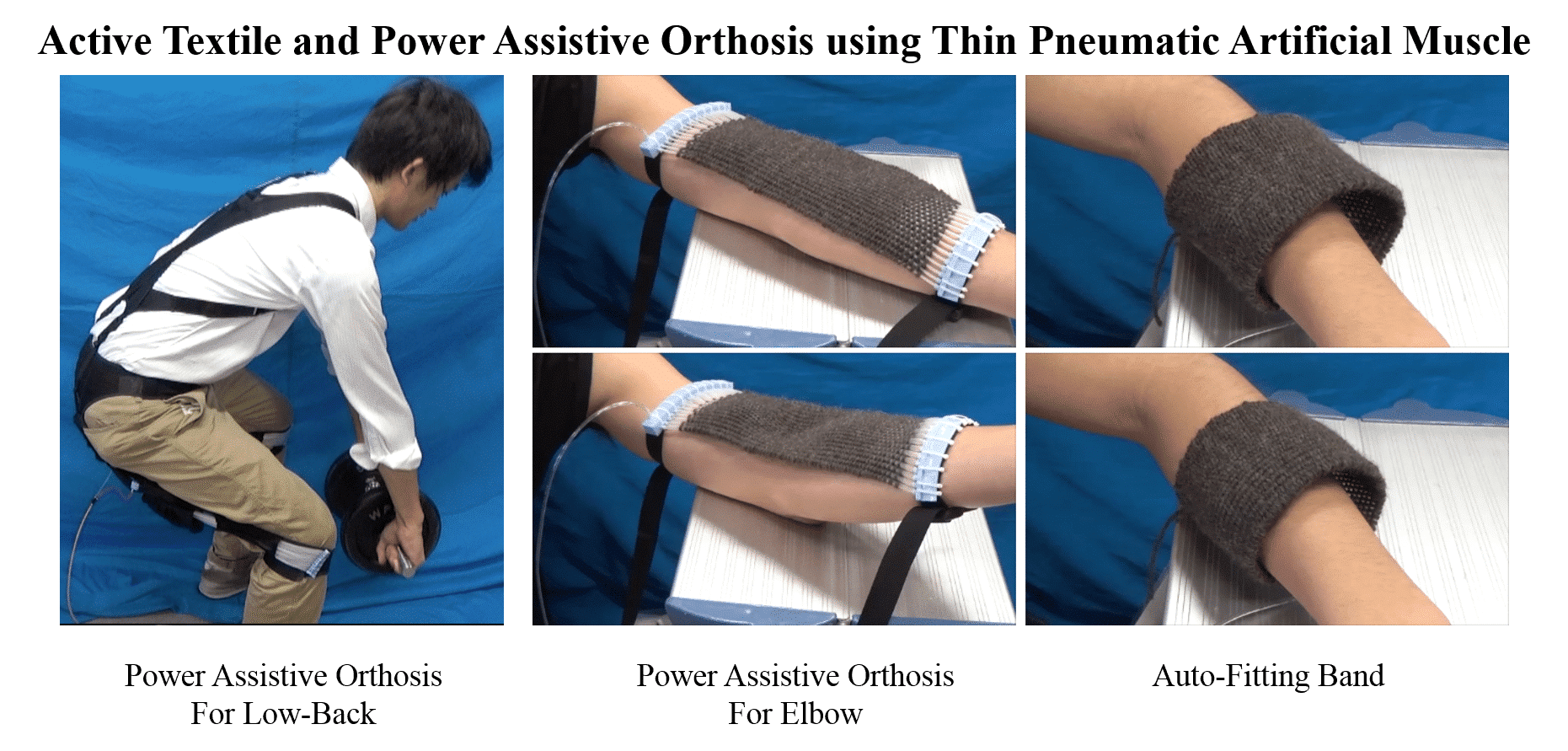
Suzumori is taking this one step further. These soft elastic materials won’t just make rescue robots more flexible, so they can navigate obstacles at disaster sites, but can also be used in the fingers of nursing care robots and in artificial arms and hands. Now he is incorporating artificial muscle fibres into clothing to create a ‘power suit’ and orthotics so wearers can perform physically demanding tasks with minimal exertion.
“Thin McKibben artificial muscle is lightweight and flexible enough to ‘sew’ or ‘weave’ into active textile or clothes, and it is expected to be one of the best actuators for the cloth-like power assistive orthoses,” he tells us. “The proposed orthosis is aimed to be user friendly, easy to wear system and can support the body structure and weight.” This will better equip doctors to treat diseases and patients with disabilities in their rehabilitation.
Pneumatic artificial muscles for orthosis was mapped by Cecilia Laschi in her Soft Robotics AtlasChart Top 5 – a trip through the flexible future of soft robotics from Italy to South Korea.
Project leader
Koichi Suzumori, Professor, Department of Mechanical Engineering, Tokyo Institute of Technology
Support the Atlas
We want the Atlas of the Future media platform and our event to be available to everybody, everywhere for free – always. Fancy helping us spread stories of hope and optimism to create a better tomorrow? For those able, we'd be grateful for any donation.
- Please support the Atlas here
- Thank you!